|
Breve descrição
(por
Ema
Coelho* e
Francisco Carvalhal**)
|
Pode considerar-se a plataforma sísmica
triaxial como constituída por três subconjuntos principais: (1) o
corpo (ou plataforma propriamente dita), sobre o qual são montados
os modelos ou espécimes a ensaiar; (2) o sistema de guiamento,
cuja principal missão consiste em assegurar que o corpo se move apenas
segundo os graus de liberdade desejados; e (3) o sistema actuador,
o qual inclui os sistemas de controlo associados e que tem por missão
impor ao corpo (e, por conseguinte, à base do espécime de ensaio) o
movimento com as características requeridas pelos diversos ensaios
sísmicos.
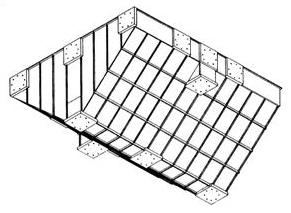
O corpo é uma estrutura em chapa de aço soldada com a forma aproximada
de um prisma triangular, constituindo uma das suas faces laterais o
tampo (com as dimensões úteis de 4,6x5,6 m2) onde são montados e
fixados, como se disse, os modelos ou espécimes a ensaiar. Foi concebido
de forma a apresentar uma elevada rigidez, tanto global como localizada
– nas zonas onde se liga com outros componentes da plataforma, quer do
sistema actuador quer do sistema de guiamento – sem que o correspondente
peso atingisse valores excessivos, dado tratar-se de uma massa móvel. |
Figura
2 – Vista da parte inferior do corpo. |
|
O sistema de guiamento merece uma abordagem
um pouco mais detalhada até porque constitui um elemento inovador
relativamente a outras plataformas sísmicas. Tal como foi já
referido, nos ensaios sísmicos realizados nesta plataforma o
movimento global do corpo deverá resultar da combinação de três
movimentos de translação segundo outros tantos eixos ortogonais
entre si (dois horizontais, designados por eixo transversal e eixo
longitudinal, e um vertical); daí, naturalmente, o facto de se
designar por plataforma triaxial. Essas translações correspondem a
três dos seis graus de liberdade do corpo da plataforma, enquanto
corpo rígido que é. Neste contexto, o sistema de guiamento deverá
eliminar (ou, na realidade, adequadamente restringir) a
possibilidade do movimento do corpo segundo esses três graus de
liberdade restantes, que, como se sabe, são constituídos por
rotações em torno dos três eixos ortogonais atrás mencionados. |
|
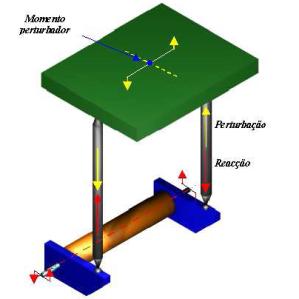
Figura 3 – Acção das barras de torção (F. Carvalhal). |
Nas plataformas sísmicas
triaxiais de que se tem conhecimento, a eliminação ou restrição
dessas três rotações é realizada com recurso a actuadores
hidráulicos servocontrolados. Trata-se, portanto, de uma via activa,
isto é, com dispêndio de energia. No caso da plataforma sísmica
triaxial do LNEC, a opção contemplou uma abordagem passiva. Com
efeito, são dispositivos mecânicos, integrados no sistema de
guiamento, que têm a missão de contrariar, restringindo, os
indesejados movimentos de rotação. Basicamente, cada um destes
dispositivos mecânicos, um para cada rotação, é constituído por uma
barra de torção (na realidade, por tubo com elevada resistência à
torção) suportada, em cada uma das extremidades, por chumaceiras, o
que lhes permite rodarem livremente em torno do seu próprio eixo. Em
cada uma dessas extremidades encontra-se uma manivela que se liga ao
corpo da plataforma através de uma biela com pares esféricos
(rótulas). Este arranjo mecânico, com rótulas esféricas, permite que
o corpo da plataforma se possa movimentar livremente segundo as três
translações desejadas. No entanto, se ocorrer um momento ou binário
perturbador – devido, por exemplo, a um momento de derrube do modelo
em ensaio e tendente a provocar a rotação do corpo em torno de um
dos eixos de translação – então as bielas de ligação da barra de
torção associada a esse eixo tenderão a deslocar-se em direcções
opostas; este facto dará origem a um binário de reacção que irá
equilibrar o binário perturbador e "eliminar", deste modo, a
possibilidade de rotação. |
|
Poder-se-á argumentar
que a solução activa conduz a um sistema de guiamento mais
simples e menos volumoso, o que, efectivamente, é verdade. Não
obstante, a solução passiva apresenta também indiscutíveis
vantagens, que, em última instância, levaram a que tivesse sido
a solução adoptada. De entre essas vantagens, citam-se as duas
consideradas como as mais relevantes. Em primeiro lugar, a
tarefa dos sistemas de controlo associados ao sistema actuador é
aliviada, o que reduz a sua complexidade e, consequentemente, o
seu custo. Em segundo lugar, o número de actuadores hidráulicos
(e dos respectivos servocontroladores) decresce
consideravelmente, o que também acarreta uma redução
significativa de custos, não apenas no que toca ao investimento
inicial mas também, e sobretudo, no que respeita a custos de
manutenção. Por último, é de salientar que a experiência
adquirida com a operação da plataforma sísmica mostra que o seu
grau de desempenho está à altura do que era esperado. |
|
Figura 4 – Alçado lateral segundo o eixo transversal |
Figura 5 – Alçado lateral segundo o eixo longitudinal |
O sistema actuador é essencialmente constituído por actuadores
óleo-hidráulicos e sistemas de controlo associados. De uma forma
sucinta, cada actuador é, por seu turno, constituído por um cilindro
(também vulgarmente conhecido por macaco) hidráulico de duplo-efeito e
de dupla-haste, por uma ou mais servoválvulas e por todo um outro
conjunto de componentes hidráulicos, de ligação, comando e segurança. O
óleo sob pressão (pressão normal de funcionamento da ordem dos 200 bar)
é fornecido por um grupo de moto-bombas hidráulicas com um débito máximo
de 690 litros/min.
A plataforma sísmica triaxial do
LNEC possui quatro actuadores óleo-hidráulicos: um, com a capacidade
nominal de 300 kN de força, para o eixo vertical, um (1000 kN) para o
eixo longitudinal e dois (2 ´ 300 kN), instalados em arranjo "push-pull",
para o eixo transversal. A massa móvel equivalente da plataforma é de
aproximadamente 40 toneladas; por outro lado, a plataforma foi
dimensionada para uma carga máxima (massa do espécime de ensaio) de
cerca de 40 toneladas. Todos os actuadores possuem um curso útil de
cerca de 145 mm, descontado já o percurso máximo correspondente ao
sistema de paragem de emergência a força constante.
Tendo em conta esses valores, verifica-se que as acelerações nominais,
ou seja, para as capacidades nominais de força dos actuadores em
presença, e para a plataforma sem espécime de ensaio, são as seguintes:
eixo transversal 15 m/s2, eixo longitudinal 25 m/s2 e eixo vertical 7,5
m/s2.
Tal como atrás foi já
mencionado, o sistema actuador foi objecto, recentemente, de uma
alteração significativa (complexa e onerosa) com vista a melhorar as
suas capacidades de velocidade segundo os três eixos. Assim, na
configuração actual, as velocidades nominais e velocidades limites que
podem ser atingidas segundo os três eixos, e durante um determinado
espaço de tempo essencialmente dependente do tipo de solicitação em
causa, são, respectivamente: eixo transversal 0,70 a 1,21 m/s, eixo
longitudinal 0,42 a 0,74 m/s e eixo vertical 0,42 a 0,73 m/s.
|
Figura 6 – Planta geral. |
Figura 7 – Vista em perspectiva. |
*investigador principal do LNEC
**Investigador-coordenador do LNEC
Excerto do artigo publicado no N.º 10 da revista
Engenharia e Vida - Fevereiro de 2005
|